
 С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
 Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
 Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
 В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
 Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
 В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
 Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
 Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
 Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
 Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот
Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот

Там, де потрібно плавне і точне регулювання швидкості і крутного моменту електромотора в широких межах, необхідна схема управління двигуном постійного струму
В рамках цього теоретичного і практичного заняття про управління двигуном постійного струму, створимо радіоаматорську пристрій яким можна було б здійснювати регулювання частоти обертання валу і стабілізувати обертів на потрібному нам рівні, незалежно від навантаження на валу електродвигуна.

Управління двигуном постійного струму трохи теорії
Сьогодні набули поширення дві основні схеми керування електродвигуном такого типу: перетворювач-двигун (тиристорний ТП-Д і транзисторний ТРП-Д варіанти) і генератор-двигун (Г-Д).
В обох випадках управління моментом і кутовий швидкістю у напрямку і абсолютним значенням відбувається за допомогою регулювання додаток різниці потенціалів до якоря електродвигуна. Напруга на якорі двігателяв системі Г-Д налаштовують зміною сили струму в обмотці збудження генератора Iвг. Для цієї мети в ролі збудника генератора використовують силові магнітні підсилювачі, тиристорні або транзисторні перетворювачі. У системах ТП-Д Uякоря змінюють методом фазового управління комутацією тиристорів, а в системах ТРП-Д регулюють шпаруватість живлячої Uпит, тобто за допомогою способу широтно-імпульсної модуляції (ШІМ).
Основою транзисторних схем є широтно-імпульсний перетворювач (ШИП), що складається з чотирьох IGBT транзисторів. У діагональ такого IGBT моста приєднана навантаження, тобто якір двигуна. Живиться ШИП від джерела постійного струму.

Існує кілька способів управління ШИП перетворювачем по ланцюгу якоря. Найпростіший з них - це симетричний метод. При такому управлінні в стані перемикання знаходяться всі чотири IGBT, і на виході ШИП ми спостерігаємо знакозмінні імпульси, тривалість яких налаштовується вхідним сигналом. Сам принцип перемикання показаний на наступному малюнку. Перевагою симетричного методу є його простота, але двухполярной U на двигуні, що викликає струмові пульсації в якорі, є серйозним мінусом. На практиці, такі схеми з симетричним керуванням використовуються в основному для управління малопотужними двигунами.

Несиметричний спосіб управління є більш досконалим. Він забезпечує на виході перетворювача однополярної U вих. Тому, відповідно до схеми вище, переключаються два транзистора Т3 і Т4, при цьому Т1 постійно відкритий, а Т2 навпаки закритий. Для того, щоб Uсреднее на виході перетворювача було нульовим, необхідно щоб нижній перемикається транзистор був закритий. Такий підхід теж не зовсім вірний, тому що верхні ключі завантажені по набагато більше, ніж нижні. При великих навантаженнях це може привести до перегріву і пошкодження схеми.
Але і з цим недоліком впоралися, придумавши метод почергового управління двигуном постійного струму. Тут як при русі в будь-яку сторонубудут перемикатися все ключі. Обов'язковою умовою роботи схеми є знаходження в протифазі керуючих напруг IGBT Т1 і Т2 для однієї групи і Т3 і Т4 для іншої.

В основі цієї радіоаматорського розробки лежить принцип роботи слідкуючого приводу з одноконтурной системою регулювання. Схема керування двигуном постійного струму складається з наступних основних частин: - СІФУ - Регулятор - Захист
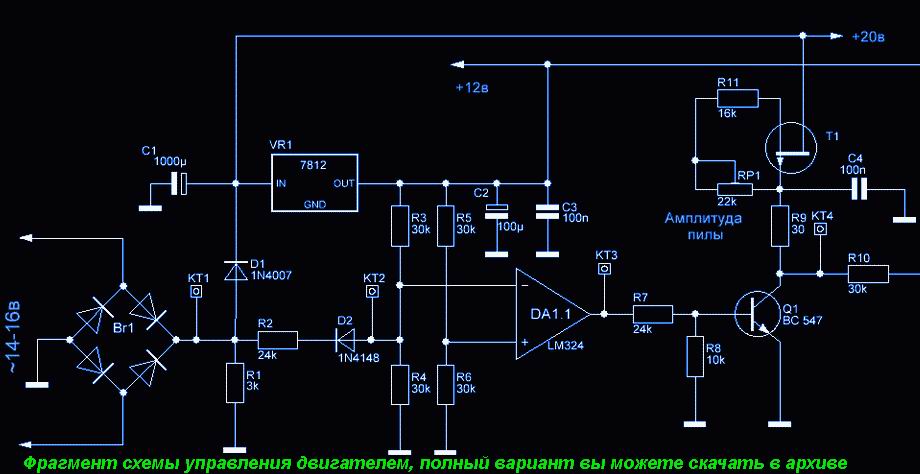
СІФУ - Система імпульсно Фазового Управління здійснює синусоидальное перетворення напруги мережі в послідовність прямокутних імпульсів, які прямують на регулюють висновки силових тиристорів. При включенні схеми змінну напругу номіналом 14 - 16 вольт проходить на мостовий випрямляч і перетворюється в пульсуюче, що служить не тільки для харчування конструкції, але і для синхронізації роботи пристрою. Діод D2 не дає згладжувати імпульси ємності С1. Потім імпульси слідують на «детектор нуля» виконаний на операційному підсилювачі LM324 елементі DA1.1, включеного в режимі компаратора. Поки імпульси відсутні, напруги на прямому і інверсному входах ОУ приблизно однакові і компаратор збалансований.
При проходженні сінусойди через точку нуля, на інверсному вході компаратора з'являються імпульси, переключають компаратор, в результаті чого на виході DA1.1 генеруються прямокутні синхроімпульсів, період проходження яких залежить від точки нуля. Подивіться на осцилограми, щоб зрозуміти принцип роботи. Зверху вниз: КТ1, КТ2, КТ3.

Управління двигуном постійного струму схема була промоделювати в програмі Multisim . В архіві з повним варіантом розглянутої конструкції є файл проекту для цієї програми. Можна його відкрити і наочно побачити як працює цей вузол, а відповідно зробити остаточні висновки про управління двигуном постійного струму, до початку збирання радіоаматорського саморобки.
Повернемося до роботи - синхроімпульсів слідують на інтегратор з транзисторним ключем (С4, Q1), де і генерується пилкоподібна U. У момент проходження фази через точку нуля синхроимпульс відмикає перший транзистор, який розряджає ємність С4. Після спаду імпульсу транзистор закривається і здійснюється заряд ємності до приходу наступного синхроимпульса, в результаті чого на колекторі транзистора (осцилограма КТ4) утворюється лінійно наростаюче Пікоподібне напруга, стабілізовану генератором стабільного струму на уніполярному транзисторі T1.
Амплітуда пилкоподібної напруги близько 9 вольт задається підлаштування опором RP1. Ця напряжение прикладається до прямого входу компаратора DA1.2. Напруга завдання слід на інверсний вхід компаратора DA1.2 і в момент часу, коли амплітуда пилоподібного напруги перевищує величину напруги на інверсному вході, компаратор перекидається в протилежне стан і на його виході генерується імпульс (осцилограма КТ4).
Імпульс диференціюється через ланцюжок пасивних радіокомпонентів R14, C6 і слід на базу другого біполярного транзистора, який завдяки цьому відкривається і на імпульсному трансформаторі утворюються імпульси відкриття силових тиристорів. Збільшуючи або зменшуючи U завдання, можна регулювати шпаруватість імпульсів в КТ5.

Але ніяких імпульсів на осциллограмме КТ5 ми не побачимо, поки не натиснемо тумблер S1. Коли він не натиснуто, напруга живлення + 12в через фронтові контакти S1 через R12, D3 слід на інверсний вхід DA1.2. Так як це U вище Uпіли, компаратор закривається, і імпульси відкривають тиристори не генеруються.
Для запобігання аварійних ситуацій і поломки електродвигуна, в разі якщо не виставлений на «0» регулятор оборотів, в схемі є вузол розгону на елементах C5, R13 призначений для плавного розгону двигуна.
При натисканні тумблера S1 контакти розмикаються і ємність С5 починає плавно заряджатися, а напруга на негативній обкладці конденсатора наближається до нуля. Напруга на вході інвертується DA1.2 зростає до величини напруги завдання, і компаратор починає генерувати імпульси для відкриття силових тиристорів. Час заряду визначається радіокомпонент C5, R13.
Якщо в процесі роботи двигуна знадобиться відрегулювати його обороти в схему доданий вузол розгону і гальмування R21, C8, R22. При збільшенні або зменшенні напруги завдання, ємність С8 плавно зарядити телефон або розряджається, що виключає різкий «накинув» напруги на інверсному вході і як наслідок виключає різкий кидок оборотів двигуна.
Управління двигуном постійного струму. Робота схеми
Регулятор застосовується для підтримки постійних обертів в зоні регулювання. Регулятор виконаний на основі диференціального підсилювача з підсумовуванням двох напруг: завдання і зворотного зв'язку. Напруга завдання формується опором RP1 і слід через фільтр на компонентах R20, C8, R21, що виконує функції вузла розгону і гальмування, надходить на інверсний вхід DA1.3. З ростом напруги завдання на виході DA1.3 лінійно знижується U вих.
Вихідна напруга регулятора слід на інверсний вхід компаратора СІФУ DA1.2 де, підсумовуючись з імпульсами "пили", перетворюється в серію прямокутних імпульсів наступних на електроди тиристорів. При збільшенні або зменшенні напруги завдання збільшується або зменшується і вихідна напруга на виході силового вузла. На графіку відображена залежність оборотів двигуна від напруги завдання.

Дільник напруги на резисторах R22, R23 приєднаний на прямий вхід регулятора DA1.3 призначений для виключення аварійної ситуації при обриві зворотного зв'язку.
При включенні приводу, тахогенератор генерує напруга, пропорційне оборотам електромотора. Ця напруга йде на вхід прецизійного детектора DA1.4, DA2.1 побудованого за класичною двонапівперіодною схемою. З його виходу напруга слід через фільтр на пасивних компонентах C10, R30, R33 на масштабуючий підсилювач ОС DA2.2. Підсилювач використовується для підгонки напруги ОС йде з тахогенератора. Напруга з виходу DA2.2 потрапляє на вхід DA1.3 і на схему захисту DA2.3.
Опором RP1 генеруються обертів електродвигуна. При роботі без навантаження, U вих масштабирующего підсилювача менше напруги на шостому виведення DA1.3, тому привід працює як регулятор.
Із зростанням навантаження на валу, знижується напруга, що знімається з тахогенератора і в результаті знижується напруга з виходу, масштабирующего підсилювача. Коли цей рівень буде менше ніж на нозі 5 ОУ DA1.3 привід увійде в зону стабілізації струму. Зниження напруги на неінвертуючий вході DA1.3 знизить напруження на його виході, а так як він працює на інвертується підсилювач DA1.2, це збільшить кут відкриття тиристорів і, отже, до зростання рівня на якорі електродвигуна.
Управління двигуном постійного струму. схема захисту
Захист від перевищення оборотів зібрана на операційному підсилювачі DА2.3, включеного як компаратор. На його інверсний вхід надходить опорна напруга з дільника R36, R37, RP3. Опором RP3 регулюється рівень спрацьовування захисту. Напруга з виходу підсилювача DA2.2 йде на прямий вхід DA2.3.
При перевищенні оборотів вище номінальних, на прямому вході компаратора перевищується поріг уставки захисту, яка визначається опором RP3 і компаратор переключитися.
Завдяки наявності в схемі позитивного зворотного зв'язку R38 призводить до «замикання» компаратора, а діод VD12 не дає скинеться компаратору. При спрацьовуванні захисту, з виходу компаратора через діод VD14 слід на інверсний вхід 13 DA1.2 СІФУ, а так як напруга захисту вище рівня «пили» відбудеться миттєвий заборона видачі керуючих імпульсів на електроди силових тиристорів.
Напруга з виходу компаратора захисту DA2.3 відмикає транзистор VT4, через що включається реле Р1.1 і спалахує світлодіод сигналізує про аварію. Зняти захист вийде якщо повністю відключити привід, і, витримавши паузу в 5 - 10 секунд знову подати на нього харчування.
Схема управління, а точніше силова частина керуючого блоку представлена на малюнку нижче:
Трансформатор Tr1 використовується для живлення схеми блоку управління. Випрямляч зібраний за полумостовой схемою і включає два силових діода D1, D2 і два силових тиристора Т1, Т2, а також захисний діод D3. Обмотка збудження живиться від свого окремого трансформатора і випрямляча. Якщо на двигуні немає тахогенератора, то ОС, для контролю оборотів, можна реалізувати наступним чином:
Якщо застосовується струмовий трансформатор, то перемичку P1 на схемі блоку управління двигуном постійного струму потрібно встановити в положення 1-3.
Ще можна застосувати датчик якірного напруги:
Датчик якірного напруги це фільтр - дільник приєднаний безпосередньо до клем якоря. Налаштування приводу здійснюється наступним чином. Опору "Завдання" і "Масштабування Uoc" викручуються в середнє положення. Опір R5 датчика якірного напруги викручується на мінімум. Включаємо привід і виставляємо напругу на якорі біля 110 вольт. Вимірюючи напруга на якорі, починаємо обертати опір R5. У певний момент зміни, напруга на якорі почне падати, це говорить про те, що спрацювала ОС.
Креслення друкованої плати керування двигуном постійного струму виконаний в програмі Sprint Layout і ви легко зможете виготовити друковану плату своїми руками методом ЛУТ
Управління двигуном настройка конструкції: почнемо з перевірки напруг живлення на операційному підсилювачі DA1, DA2. Мікросхеми рекомендується встановлювати в панельки. Потім перевіряємо осцилограми в контрольних точках КТ1, КТ2, КТ3. У точці КТ4. ми повинні побачити пилковидні імпульси, при розімкнутої кнопці.
Підлаштування опором RP1 виставляємо розмах «пили» близько 9 вольт. У контрольній точці КТ3 тривалість імпульсу близько 1.5 - 1.8ms, якщо ми цього не видем, то зменшенням опору R4 добиваємося необхідної тривалості.
Обертаючи важіль RR1 схеми управління двигуном в контрольній точці КТ5 контролюємо зміна шпаруватості імпульсів від максимуму до повного їх зникнення при мінімальному опорі RR1. При цьому повинна змінюватися яскравість лампочки підключеної до силового блоку яку ми підключили в якості навантаження.
Потім подсоеденяем блок управління до двигуна і тахогенератора. Встановлюємо регулятором RR1 напругу на якорі 40-50 вольт. Опір RP3 повинен бути в середньому положення. Вимірюючи напругу на якорі двигуна, обертаємо опір RP3. У певний момент настройки U на якорі почне падати, це говорить про те, що спрацювала зворотний зв'язок.
Якщо використовується зворотний зв'язок у схемі керування двигуном по току якоря потрібно струмовий трансформатор, включений в ланцюг харчування випрямляча. Схема калібрування трансформатора струму розглянута нижче. Підбором опору отримати на виході трансформатора змінна напруга 2 ÷ 2.5v. Потужність навантаження RN1 повинна дорівнювати потужності двигуна

Пам'ятайте, що струмовий трансформатор без навантажувального резистора включати не рекомендується.
Підключаємо трансформатор струму до ланцюга ОС P1 і P2. На час регулювання рекомендується випаять діод D12, щоб не було помилкового спрацьовування захисту. Осцилограми в контрольних точках КТ8, КТ9, Кт10 показані на малюнку нижче.

Подальша регулювання така ж як і в випадку з використання тахогенератора.
Даний блок управління двигуном постійного струму виготовлявся своїми рукмі для розточувального верстата. Фотографії дивись в архіві по зеленій посиланням вище.
Схема реверсу двигуна постійного струму
Схема показана на малюнку нижче здатна запускати обертання "L в обох напрямках, як вперед, так і назад. При розімкнутих контактах перемикачів, напруга на обох клемах однакове, тому він не буде обертатися, те ж саме станеться якщо натиснути одночасно кнопки.
