
 С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
 Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
 Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
 В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
 Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
 В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
 Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
 Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
 Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
 Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот
Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот

- механічна енергія Енергією називається скалярна фізична величина, що є єдиною мірою різних форм руху...
- Теорема про кінетичну енергію
- Фізичний сенс кінетичної енергії
- Потенціальна енергія
- Потенційна енергія взаємодії тіла з Землею
- Фізичний сенс потенційної енергії взаємодії тіла з Землею
- Потенційна енергія гравітаційної взаємодії
- Потенційна енергія пружно деформованого тіла
- Фізичний сенс потенційної енергії деформованого тіла
- Закон збереження енергії в механічних процесах
- Закон про зміну механічної енергії
- Закон збереження і перетворення енергії
- література
механічна енергія
Енергією називається скалярна фізична величина, що є єдиною мірою різних форм руху матерії і заходом переходу руху матерії з одних форм в інші.
Для характеристики різних форм руху матерії вводяться відповідні види енергії, наприклад: механічна, внутрішня, енергія електростатичних, внутрішньоядерних взаємодій і ін.
Енергія підкоряється закону збереження, який є одним з найважливіших законів природи.
Механічна енергія Е характеризує рух і взаємодія тіл і є функцією швидкостей і взаємного розташування тіл. Вона дорівнює сумі кінетичної і потенційної енергій.
Кінетична енергія
Розглянемо випадок, коли на тіло масою m діє постійна сила \ (~ \ vec F \) (вона може бути рівнодіюча кількох сил) і вектори сили \ (~ \ vec F \) і переміщення \ (~ \ vec s \) спрямовані уздовж одній прямій в одну сторону. У цьому випадку роботу сили можна визначити як A = F ∙ s. Модуль сили по другим законом Ньютона дорівнює F = m ∙ a, а модуль переміщення s при рівноприскореному прямолінійному русі пов'язаний з модулями початковій υ 1 і кінцевої υ 2 швидкості і прискорення а виразом \ (~ s = \ frac {\ upsilon ^ 2_2 - \ upsilon ^ 2_1} {2a} \).
Звідси для роботи отримуємо
\ (~ A = F \ cdot s = m \ cdot a \ cdot \ frac {\ upsilon ^ 2_2 - \ upsilon ^ 2_1} {2a} = \ frac {m \ cdot \ upsilon ^ 2_2} {2} - \ frac {m \ cdot \ upsilon ^ 2_1} {2} \). (1)
Фізична величина, що дорівнює половині твори маси тіла на квадрат його швидкості, називається кінетичної енергією тіла.
Кінетична енергія позначається буквою E k.
\ (~ E_k = \ frac {m \ cdot \ upsilon ^ 2} {2} \). (2)
Тоді рівність (1) можна записати в такому вигляді:
\ (~ A = E_ {k2} - E_ {k1} \). (3)
Теорема про кінетичну енергію
робота рівнодіючої сил, прикладених до тіла, дорівнює зміні кінетичної енергії тіла.
Так як зміна кінетичної енергії дорівнює роботі сили (3), кінетична енергія тіла виражається в тих же одиницях, що і робота, т. Е. В джоулях.
Якщо початкова швидкість руху тіла масою m дорівнює нулю і тіло збільшує свою швидкість до значення υ, то робота сили дорівнює кінцевому значенню кінетичної енергії тіла:
\ (~ A = E_ {k2} - E_ {k1} = \ frac {m \ cdot \ upsilon ^ 2} {2} - 0 = \ frac {m \ cdot \ upsilon ^ 2} {2} \). (4)
Фізичний сенс кінетичної енергії
кінетична енергія тіла, що рухається зі швидкістю υ, показує, яку роботу повинна зробити сила, що діє на покоїться тіло, щоб повідомити йому цю швидкість.
Потенціальна енергія
Потенційна енергія - це енергія взаємодії тіл.
Потенційна енергія піднятого над Землею тіла - це енергія взаємодії тіла і Землі гравітаційними силами. Потенційна енергія пружно деформованого тіла - це енергія взаємодії окремих частин тіла між собою силами пружності.
Потенційними називаються сили, робота яких залежить тільки від початкового і кінцевого положення рухається матеріальної точки або тіла і не залежить від форми траєкторії.
При замкнутій траєкторії робота потенційної сили завжди дорівнює нулю. До потенційних силам відносяться сили тяжіння, сили пружності, електростатичні сили і деякі інші.
Сили, робота яких залежить від форми траєкторії, називаються непотенційного. При переміщенні матеріальної точки або тіла по замкнутій траєкторії робота непотенційного сили не дорівнює нулю.
Потенційна енергія взаємодії тіла з Землею
Знайдемо роботу, що здійснюються силою тяжіння F т при переміщенні тіла масою m вертикально вниз з висоти h 1 над поверхнею Землі до висоти h 2 (рис. 1). Якщо різниця h 1 - h 2 дуже мала в порівнянні з відстанню до центру Землі, то силу тяжіння F т під час руху тіла можна вважати постійною і рівною mg.
Так як переміщення збігається за напрямком з вектором сили тяжіння, робота сили тяжіння дорівнює
\ (~ A = F \ cdot s = m \ cdot g \ cdot (h_1 - h_2) \). (5) 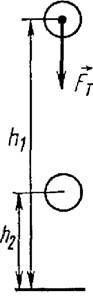 Мал. 1
Мал. 1
Розглянемо тепер рух тіла по похилій площині. При переміщенні тіла вниз по похилій площині (рис. 2) сила тяжіння F т = m ∙ g здійснює роботу
\ (~ A = m \ cdot g \ cdot s \ cdot \ cos \ alpha = m \ cdot g \ cdot h \), (6)
де h - висота похилій площині, s - модуль переміщення, рівний довжині похилій площині.
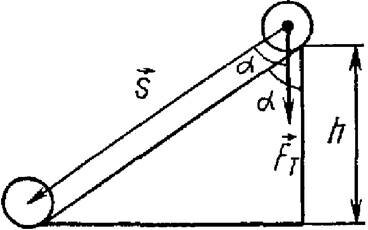
Мал. 2
Рух тіла з точки В в точку С по будь-якій траєкторії (рис. 3) можна подумки уявити що складається з переміщень по ділянках похилих площин з різними висотами h ', h' 'і т. Д. Робота А сили тяжіння на всьому шляху з В в З дорівнює сумі робіт на окремих ділянках шляху:
\ (~ A = m \ cdot g \ cdot h '+ m \ cdot g \ cdot h' '+ \ ldots + m \ cdot g \ cdot h ^ n = m \ cdot g \ cdot (h' + h '' + \ ldots + h ^ n) = m \ cdot g \ cdot (h_1 - h_2) \), (7)
де h 1 і h 2 - висоти від поверхні Землі, на яких розташовані відповідно точки В і С.

Мал. 3
Рівність (7) показує, що робота сили тяжіння не залежить від траєкторії руху тіла і завжди дорівнює добутку модуля сили тяжіння на різницю висот в початковому і кінцевому положеннях.
При русі вниз робота сили тяжіння позитивна, при русі вгору - негативна. Робота сили тяжіння на замкнутої траєкторії дорівнює нулю.
Рівність (7) можна представити в такому вигляді:
\ (~ A = - (m \ cdot g \ cdot h_2 - m \ cdot g \ cdot h_1) \). (8)
Фізичну величину, що дорівнює добутку маси тіла на модуль прискорення вільного падіння і на висоту, на яку піднято тіло над поверхнею Землі, називають потенційною енергією взаємодії тіла і Землі.
Робота сили тяжіння при переміщенні тіла масою m з точки, розташованої на висоті h 2, в точку, розташовану на висоті h 1 від поверхні Землі, по будь-якій траєкторії дорівнює зміні потенційної енергії взаємодії тіла і Землі, взятому з протилежним знаком.
\ (~ A = - (E_ {p2} - E_ {p1}) \). (9)
Потенційна енергія позначається буквою Е p.
Значення потенційної енергії тіла, піднятого над Землею, залежить від вибору нульового рівня, т. Е. Висоти, на якій потенційна енергія приймається рівною нулю. Зазвичай приймають, що потенційна енергія тіла на поверхні Землі дорівнює нулю.
При такому виборі нульового рівня потенційна енергія Е p тіла, що знаходиться на висоті h над поверхнею Землі, дорівнює добутку маси m тіла на модуль прискорення вільного падіння g і відстань h його від поверхні Землі:
\ (~ E_p = m \ cdot g \ cdot h \). (10)
Фізичний сенс потенційної енергії взаємодії тіла з Землею
потенційна енергія тіла, на яке діє сила тяжіння, дорівнює роботі, яку здійснюють силою тяжіння при переміщенні тіла на нульовий рівень.
На відміну від кінетичної енергії поступального руху, яка може мати лише позитивні значення, потенційна енергія тіла може бути як позитивною, так і негативною. Тіло масою m, що знаходиться на висоті h, де h <h 0 (h 0 - нульова висота), володіє негативною потенційною енергією:
\ (~ E_p = -m \ cdot g \ cdot h \).
Потенційна енергія гравітаційної взаємодії
Потенційна енергія гравітаційної взаємодії системи двох матеріальних точок з масами m і М, що знаходяться на відстані r одна від одної, дорівнює
\ (~ E_p = G \ cdot \ frac {M \ cdot m} {r} \). (11)
де G - гравітаційна стала, а нуль відліку потенційної енергії (Е p = 0) прийнятий при r = ∞.
Потенційна енергія гравітаційної взаємодії тіла масою m з Землею, де h - висота тіла над поверхнею Землі, M e - маса Землі, R e - радіус Землі, а нуль відліку потенційної енергії обраний при h = 0.
\ (~ E_e = G \ cdot \ frac {M_e \ cdot m \ cdot h} {R_e \ cdot (R_e + h)} \). (12)
При тому ж умови вибору нуля відліку потенційна енергія гравітаційної взаємодії тіла масою m з Землею для малих висот h (h «R e) дорівнює
\ (~ E_p = m \ cdot g \ cdot h \),
де \ (~ g = G \ cdot \ frac {M_e} {R ^ 2_e} \) - модуль прискорення вільного падіння поблизу поверхні Землі.
Потенційна енергія пружно деформованого тіла
Обчислимо роботу, що здійснюються силою пружності при зміні деформації (подовження) пружини від деякого початкового значення x 1 до кінцевого значення x 2 (рис. 4, б, в).
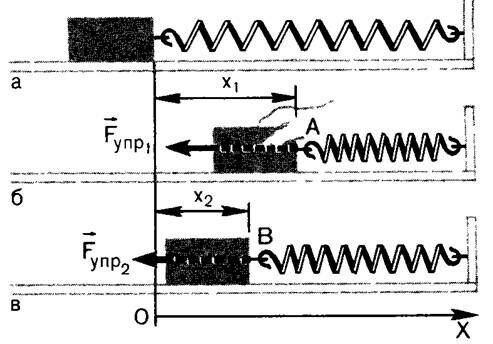
Мал. 4
Сила пружності змінюється в процесі деформації пружини. Для знаходження роботи сили пружності можна взяти середнє значення модуля сили (тому що сила пружності лінійно залежить від x) і помножити на модуль переміщення:
\ (~ A = F_ {upr-cp} \ cdot (x_1 - x_2) \), (13)
де \ (~ F_ {upr-cp} = k \ cdot \ frac {x_1 - x_2} {2} \). Звідси
\ (~ A = k \ cdot \ frac {x_1 - x_2} {2} \ cdot (x_1 - x_2) = k \ cdot \ frac {x ^ 2_1 - x ^ 2_2} {2} \) або \ (~ A = - \ left (\ frac {k \ cdot x ^ 2_2} {2} - \ frac {k \ cdot x ^ 2_1} {2} \ right) \). (14)
Фізична величина, що дорівнює половині твори жорсткості тіла на квадрат його деформації, називається потенційною енергією пружно деформованого тіла:
\ (~ E_p = \ frac {k \ cdot x ^ 2} {2} \). (15)
З формул (14) і (15) випливає, що робота сили пружності дорівнює зміні потенційної енергії пружно деформованого тіла, взятому з протилежним знаком:
\ (~ A = - (E_ {p2} - E_ {p1}) \). (16)
Якщо x 2 = 0 і x 1 = х, то, як видно з формул (14) і (15),
\ (~ E_p = A \).
Фізичний сенс потенційної енергії деформованого тіла
потенційна енергія пружно деформованого тіла дорівнює роботі, яку здійснює сила пружності при переході тіла в стан, в якому деформація дорівнює нулю.
Закон збереження енергії в механічних процесах
Потенційна енергія характеризує взаємодіючі тіла, а кінетична енергія - рухомі тіла. І потенційна, і кінетична енергія змінюються тільки в результаті такої взаємодії тіл, при якому діють на тіла сили здійснюють роботу, відмінну від нуля. Розглянемо питання про зміни енергії при взаємодіях тіл, що утворюють замкнену систему.
Замкнута система - це система, на яку не діють зовнішні сили або дія цих сил скомпенсировано. Якщо кілька тіл взаємодіють між собою тільки силами тяжіння і силами пружності і ніякі зовнішні сили на них не діють, то при будь-яких взаємодіях тіл робота сил пружності або сил тяжіння дорівнює зміні потенційної енергії тіл, взятому з протилежним знаком:
\ (~ A = - (E_ {p2} - E_ {p1}) \). (17)
По теоремі про кінетичної енергії, робота тих же сил дорівнює зміні кінетичної енергії:
\ (~ A = E_ {k2} - E_ {k1} \). (18)
З порівняння рівності (17) і (18) видно, що зміна кінетичної енергії тіл в замкнутій системі дорівнює за абсолютним значенням зміни потенційної енергії системи тіл і протилежно йому по знаку:
\ (~ E_ {k2} - E_ {k1} = - (E_ {p2} - E_ {p1}) \) або \ (~ E_ {k1} + E_ {p1} = E_ {k2} + E_ {p2} \). (19)
Закон збереження енергії в механічних процесах:
сума кінетичної і потенційної енергії тіл, що складають замкнуту систему і взаємодіючих між собою силами тяжіння і силами пружності, залишається незмінною.
Сума кінетичної і потенційної енергії тіл називається повною механічною енергією.
Основний зміст закону збереження енергії полягає не тільки у встановленні факту збереження повної механічної енергії, а й у встановленні можливості взаємних перетворень кінетичної і потенційної енергії тіл в рівній кількісної мірою при взаємодії тел.
Наведемо найпростіший досвід. Підкинемо вгору сталева кулька. Повідомивши початкову швидкість υнач, ми надамо йому кінетичну енергію, через що він почне підніматися вгору. Дія сили тяжіння призводить до зменшення швидкості кульки, а значить, і його кінетичної енергії. Але кулька піднімається вище і вище і набуває все більше і більше потенційної енергії (Е p = m ∙ g ∙ h). Таким чином, кінетична енергія не зникає безслідно, а відбувається її перетворення в потенційну енергію.
У момент досягнення верхньої точки траєкторії (υ = 0) кулька повністю позбавляється кінетичної енергії (Е k = 0), але при цьому його потенційна енергія стає максимальною. Далі кулька змінює напрямок руху і з наростаючою швидкістю рухається вниз. Тепер відбувається зворотне перетворення потенційної енергії в кінетичну.
Закон збереження енергії розкриває фізичний зміст поняття роботи:
робота сил тяжіння і сил пружності, з одного боку, дорівнює збільшенню кінетичної енергії, а з іншого боку, - зменшення потенційної енергії тел. Отже, робота дорівнює енергії, що перетворилася з одного виду в інший.
Закон про зміну механічної енергії
Якщо система взаємодіючих тіл не замкнута, то її механічна енергія не зберігається. Зміна механічної енергії такої системи дорівнює роботі зовнішніх сил:
\ (~ A_ {vn} = \ Delta E = E - E_0 \). (20)
де Е і Е 0 - повні механічні енергії системи в кінцевому і початковому станах відповідно.
Прикладом такої системи може служити система, в якій поряд з потенційними силами діють непотенціальні сили. До непотенційного силам відносяться сили тертя. У більшості випадків, коли кут між силою тертя F tr і елементарним переміщенням Δ r тіла становить π радіан, робота сили тертя негативна і дорівнює
\ (~ A_ {tr} = -F_ {tr} \ cdot s_ {12} \),
де s 12 - шлях тіла між точками 1 і 2.
Сили тертя при русі системи зменшують її кінетичну енергію. В результаті цього механічна енергія замкнутої неконсервативної системи завжди зменшується, переходячи в енергію немеханических форм руху.
Наприклад, автомобіль, що рухався по горизонтальному ділянці дороги, після вимкнення двигуна проходить певний шлях і під дією сил тертя зупиняється. Кінетична енергія поступального руху автомобіля стала рівною нулю, а потенційна енергія не збільшилася. Під час гальмування автомобіля відбулося нагрівання гальмівних колодок, шин автомобіля і асфальту. Отже, в результаті дії сил тертя кінетична енергія автомобіля не зникла, а перетворилася у внутрішню енергію теплового руху молекул.
Закон збереження і перетворення енергії
при будь-яких фізичних взаємодіях енергія перетворюється з однієї форми в іншу.
Іноді кут між силою тертя F tr і елементарним переміщенням Δ r дорівнює нулю і робота сили тертя позитивна:
\ (~ A_ {tr} = F_ {tr} \ cdot s_ {12} \),
Приклад 1. Нехай, зовнішня сила F діє на брусок В, який може ковзати по візку D (рис. 5). Якщо візок переміщається вправо, то робота сили тертя ковзання F tr2, що діє на візок з боку бруска, позитивна:
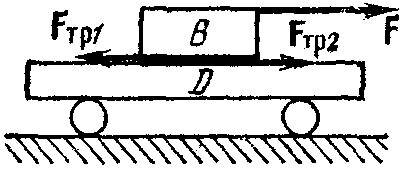
Мал. 5
Приклад 2. При коченні колеса його сила тертя кочення спрямована уздовж руху, так як точка дотику колеса з горизонтальною поверхнею рухається в напрямку, протилежному напрямку руху колеса, і робота сили тертя позитивна (рис. 6):
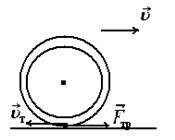
Мал. 6
література
- Кабардин О.Ф. Фізика: Справ. матеріали: Учеб. посібник для учнів. - М .: Просвещение, 1991. - 367 с.
- Кикоин І.К., Кикоин А.К. Фізика: Учеб. для 9 кл. середовищ. шк. - М .: Про-заповітного, 1992. - 191 с.
- Елементарний підручник фізики: Учеб. посібник. У 3 т. / Под ред. Г.С. Ландсберга: т. 1. Механіка. Теплота. Молекулярна фізика. - М .: Физматлит, 2004. - 608 с.
- Яворський Б.М., Селезньов Ю.О. Довідник з фізики для вступників до вузів і самоосвіти. - М .: Наука, 1983. - 383 с.
укладачі
Варахобова Анна (11 «А», МГОЛ № 1, 2008 року)
