
 С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
 Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
 Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
 В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
 Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
 В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
 Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
 Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
 Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
 Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот
Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот




НОВІ безшатунного МЕХАНІЗМИ ДЛЯ ПОРШНЕВИХ МАШИН
Володимир Олександрович Ворогушін,
провідний інженер Долгопрудненського конструкторського бюро автоматики (ДКБА), к.т.н.
В історії техніки навряд чи можна знайти пристрої, яким приділялося б стільки уваги, скільки випало на долю механізмів перетворення зворотно-поступального руху в обертальний. З часів Дж. Пакарда, (1780 р - патент на кривошипно-шатунний механізм (КШМ)) і Дж. Уатта (1784 г. - перша парова машина з КШМ) тисячі винахідників різних країн і поколінь натхненно шукали ідеальну схему, вільну від недоліків КШМ . Особливо інтенсивно цей процес проходив в ХХ столітті і триває досі. І кожен раз виявлялося, що більшість запропонованих рішень зайво складні, що не працездатні під навантаженням або обмежено працездатні в силу властивих їм недоліків. Позиції ж КШМ на тлі загального технологічного розвитку неухильно зміцнювалися.
У цьому змаганні, серед небагатьох знахідок, гідно проявив себе безшатунного механізм, розроблений відомим радянським конструктором авіаційних двигунів Сергієм Степановичем Баландіним і втілений під його керівництвом в досвідчених моторах ОМБ, МБ-4, МБ-4б, МБ-8, МБ-8б, ОМ -127РН і ОМ-127РНТ (1937-1951 рр.). Після війни, в серпні 1946 р організовано ОКБ-2 при заводі № 500 МАП, де перед колективом С.С. Баландіна була поставлена найважливіша державна задача - з урахуванням попереднього досвіду розробки двигунів ОМБ, МБ-4, -4б, -8, -8б, створити для міжконтинентального стратегічного бомбардувальника потужний поршневий двигун з циліндрами подвійної дії. Це один з багатьох прикладів того часу, коли творча енергія розробників цілеспрямовано підкріплювалася потоком необхідних державних ресурсів і дала прекрасні технічні результати.
Після зняття режиму секретності, завдяки книгам С.С. Баландіна [1], безшатунного механізм став широко відомий і з тих пір не дає спокою багатьом конструкторам моторної техніки. Інтерес до теми не спадає. Потенціал ідеї активно стимулює пошуки її нових версій.
Згадаймо, що вдає із себе безшатунного механізм. С.С. Баландіним були досліджені три схеми. Працездатність підтвердили дві з них - з суміщеними ексцентриками і з з'єднувальним синхронизирующим валом [1]. Перша виявилася придатною тільки для Короткоходовая ДВС, тому що діаметр суміщених ексцентриків штокової підшипників ковзання знаходиться в прямій залежності від діаметра шийок колінчастого вала, на який вони спираються. Друга не мала цього недоліку, доповнювалася іншими позитивними якостями і тому була реалізована у всіх досвідчених розробках колективу С.С. Баландіна.
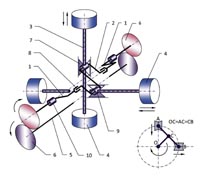 На рис.1 зображена схема безшатунного механізму з з'єднувальним валом.
На рис.1 зображена схема безшатунного механізму з з'єднувальним валом.
Проміжна ланка в ньому виконано у вигляді планетарного колінчастого вала (ПКВ) 2, який своїми опорними шийками 8 поміщений в підшипники полувалов 1. Назвемо їх "водилами" (За аналогією з планетарними механізмами). Зі схеми зрозуміло, що водила 1 повинні обертатися суворо синхронно. Цю функцію, одночасно з підсумовуванням потужності, забезпечує з'єднувальний вал 5 і дві пари шестерень 6.
Основне геометричне умова механізму - рівність між собою ексцентриситету центрів шийок ПКВ і ексцентриситету центру його опорного підшипника в водію 8, тобто має бути справедливий вираз виду ОС = АС = СВ (рис. 1). За величиною ці ексцентриситети складають 1/4 ходу поршня Sп.
Для безшатунного схем С.С. Баландіна характерна наявність плазунів 7 (крейцкопфів). Вони беруть на себе всю бічну робоче навантаження. Повзун 7, відокремлений від поршня 4 і знаходиться в сприятливих умовах змащення, дозволив багаторазово підняти ресурс механізму і забезпечити створення компактних авіаційних ДВС з двостороннім робочим процесом, першими представниками яких стали досвідчені двигуни ОМ-127РН і ОМ-127РНТ, що напрацювали на випробувальних стендах в різній комплектації 1 476 годин [4] без поломок, дефектів і без заміни деталей (ЦИАМ. Справа № 10 20-й перебирання ОМ-127 № 01).
Проте, для Х-образної схеми можливий варіант без плазунів. В цьому випадку бічна навантаження на поверхнях поршнів присутній, але вона розпадається на два протилежних поршня і тому питомий тиск їх бічних поверхонь на дзеркало циліндрів зменшується в два рази. Варіант без плазунів відноситься до безшатунного схемою Чарльза Алджернона Парсонсон - англійського інженера, вперше який запропонував її в вісімдесятих роках ХIX століття для парового двигуна. За своїми властивостями схема є проміжною. Її застосування технічно виправдано в безшатунного поршневих машинах з циліндрами односторонньої дії.
Повернемося до рис. 1. В процесі робочих ходів, штоки 3, із закріпленими на них поршнями 4 циліндрів, здійснюють прямолінійний зворотно-поступальний рух і передають зусилля через штоковий підшипник 9 на шийки ПКВ 2, а вони, в свою чергу, через суміжні опорні шийки 8 створюють на кожному водію 1 крутний момент, який підсумовується з'єднувальним валом 5 і виводиться на вихідний вал до споживача.
У порівнянні з ДВС, що має традиційний КШМ, двигуни з безшатунного механізмом С.С. Баландіна привертає до себе увагу поруч цінних якостей. Серед них:
- високе значення механічного ККД (0,93 ... 0,96; к.к.д. двигуна з КШМ 0,78 ... 0,86);
- менша теплонапряженность двигуна і пов'язане з цим зменшення потрібної площі повітряних радіаторів системи охолодження в 1,5 рази і водо-масляних радіаторів в 2,5 ... 3,0 рази [1];
- можливість використання високих допустимих середніх швидкостей поршня;
- великий ресурс циліндропоршневої групи і механізму руху (тисячі і десятки тисяч годин в залежності від розмірності ДВС);
- відсутність бічних перекладань поршнів в циліндрах і безізносная робота поршневих канавок для кілець [4];
- можливість роботи на більш високих ступенях стиснення (для бензинових ДВС безпечна ступінь стиснення вище на 1 ... 2 одиниці);
- можливість реалізації двостороннього робочого процесу при малих габаритах;
- зменшений обсяг картерной простору із збереженням достатньої жорсткості блок-картера;
- значно (в 1,6 ... 1,8 рази) менші питомі навантаження на елементи механізму руху завдяки сприятливому поєднанню дії газових і інерційних сил [1];
- висока паливна економічність (питома витрата палива, при інших рівних умовах, нижче на 10 ... 12%, ніж у аналогічних двигунів з КШМ);
- висока літрова потужність (до 120 кВт / л; в форсованих двигунах до 170 кВт / л);
- висока питома потужність (2,2 ... 3,3 кВт / кг і вище);
- низька питома маса (0,30 ... 0,45 кг / кВт, в турбопоршневий варіанті до 0,14 кг / кВт);
- високі параметри компактності конструкції (миделевого площа менше, ніж у двигунів з КШМ в 2 рази).
Цьому типу ДВС властиві і недоліки, велика частина яких переборна або може бути ослаблена в процесі розвитку. Деякі з них характерні для однієї схеми, але відсутні в іншій. Наприклад, одноциліндрова компоновка безшатунного механізму реалізується тільки в схемі з планетарної зубчастої передачею довгоходові поршневий машини, яка потребує наявності плазунів. Аналогічно, в довгоходові поршневий машині з використанням планетарної зубчастої передачі можна спроектувати рядну і опозитний компонування безшатунного механізму, але в схемах з суміщеними ексцентриками і з з'єднувальним валом ці компонування вже вимагають введення на ПКВ додаткових паразитних шийок з окремо працюють повзунами.
До недавнього часу залишалися неясними причини ефекту "клина" безшатунного механізму, який міг випадковим чином проявитися відразу після складання двигуна або в процесі його роботи під навантаженням після повного прогріву. Виявилося, що в першому випадку основну роль відігравало відсутність вивіреної методології призначення номінальних розмірів ланок механізму і не облік деяких конструктивних факторів роботи плазунів в напружено-деформований стан [2]. У другому випадку, при проектуванні не було приділено достатньо уваги конструктивним заходам, що компенсує температурні деформації і виробничі похибки незбіжності перетину осей циліндрів з центральною віссю блок-картера [3]. Відповідно, там, де ефект "клина" давав про себе знати, відновлення працездатності двигуна вимагало проведення доводочних робіт, що розцінювалося як серйозна перешкода для великосерійного виробництва. В даний час методологія призначення номінальних розмірів ланок безшатунного механізму розроблена [2]. Конструктивні заходи по компенсації температурних деформацій і мінімізації похибок перетину осей визначені [3], а пов'язані з ефектом "клина" перешкоди для організації крупносерійного виробництва безшатунного поршневих машин зняті.
Схеми безшатунного механізмів з суміщеними ексцентриками і з з'єднувальним валом мають такі недоліки:
- опозитний і рядна компоновка містять на ПКВ додаткові паразитні шийки, направляючі і масивні повзуни (компенсація маси відсутніх штоків і поршнів) (частково можна подолати);
- більш складна конструкція в порівнянні з КШМ (частково можна подолати);
- необхідність врахування наслідків наявності в схемі зайвої кінематичного зв'язку (негативний вплив можна перебороти);
- подвоєна кутова і лінійна швидкість обертання опорних підшипників ПКВ (можна перебороти в частині зниження подвоєних лінійних швидкостей);
- наявність сполучного валу з двома парами шестерень (можна перебороти);
- нерівномірний знос робочих поверхонь опорних підшипників ПКВ в водив, що викликається наявністю технологічного зазору в парах зубчастих зачеплень і кінцевої жорсткості всієї синхронизирующей ланцюга (можна перебороти).
Новим конструктивних рішень, що виключає останні три недоліки, і присвячена ця стаття.
Вивчення матеріалів книги С.С. Баландіна [1] постійно наводило на думку про те, що повинні існувати більш прості варіанти безшатунного механізму. На це побічно вказувало наявність різних і, в той же час, тісно пов'язаних між собою недоліків трьох досліджених С.С. Баландіним схем. У процесі розв'язання обернених задач побудови безшатунного механізму здогад підтвердився.
Справді, якщо в штокової підшипнику ми маємо занадто великий діаметр спарених ексцентриків, то логічніше все-таки перенести їх в центральні опори, а штокові шийки зробити оптимального діаметру, що фактично і було виконано в двигунах ОМБ, МБ-4, МБ-8 , ОМ-127РН, ОМ-127РНТ і М-127К, хоча в книзі С.С. Баландіна [1] даний момент спеціально не обмовляється. Але тоді на кінцях ПКВ ми маємо два окремих полувал з водилами, які доводиться синхронізувати з'єднувальним валом і двома парами шестерень. Так може бути створити можливість безпосередньої передачі крутного моменту споживачеві прямо від ПКВ в процесі його планетарного руху?
Але як? Передача крутного моменту через планетарну зубчасту передачу не забезпечується міцністю саттелітной шестерні Короткоходовая ДВС [1].
Поставити між вихідним валом і ПКВ карданний вал? Однак, його кутовий нахил через швидке зростання втрат, не повинен перевищувати 10 ... 12 °, а це суттєво збільшує поздовжній розмір двигуна.
Використовувати ШРУС? На відміну від карданного валу ШРУС дає робочі кути зсуву між осями до 40 ° - що привабливо, але він складний, доріг і менш надійний, ніж сам ДВС. До того ж, загальним недоліком карданного з'єднання і ШРУСов для названого застосування є надлишкова функціональність. Вони передають потужність не тільки між паралельними осями, але і при їх кутовому зміщенні під час роботи, що в поставленому завданню не потрібно.
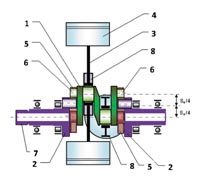 Вибір припав на принцип шарнірного паралелограма. Він дає нам саме те, що потрібно - передачу потужності контактними циліндричними поверхнями між співісними валами з постійним ексцентриситетом. В результаті весь безшатунного механізм різко спростився. Зник синхронизирующий з'єднувальний вал з його опорами і двома парами шестерень. Конструкція стала помітно технологічнішими, менш трудомісткою у виготовленні і збірці. У підсумку, з'явилася нова схема безшатунного механізму в варіанті А (рис. 2).
Вибір припав на принцип шарнірного паралелограма. Він дає нам саме те, що потрібно - передачу потужності контактними циліндричними поверхнями між співісними валами з постійним ексцентриситетом. В результаті весь безшатунного механізм різко спростився. Зник синхронизирующий з'єднувальний вал з його опорами і двома парами шестерень. Конструкція стала помітно технологічнішими, менш трудомісткою у виготовленні і збірці. У підсумку, з'явилася нова схема безшатунного механізму в варіанті А (рис. 2).
Принцип роботи зберігся. Протилежно сидять на штоку 3 поршні 4 передають робочі зусилля на шийки ПКВ 1. Вісь ПКВ робить планетарне обертання навколо центральної осі (переносний рух) і обертання навколо власної осі в протилежному напрямку (відносний рух). Весь корисний крутний момент передається в відносному русі. Він йде безпосередньо від ПКВ 1 через елементи шарнірного паралелограма на вихідний вал 7. Основними елементами шарнірного паралелограма тут є силові пальці 6 і обертаються на них сережки 5. Силові пальці 6 запресовані в план-шайбу 8 ПКВ і в план-шайбу 9 вихідного вала симетрично на розрахунковому радіусі окружності. Їх кількість на одній площині план-шайби може бути від трьох до дев'яти. Як правило, достатньо мати по три силових пальці на кожній план-шайбі.
Залишається з'ясувати роль тих елементів, на які спирається ПКВ при своєму планетарному обертанні. Якщо в механізмі С.С. Баландіна з з'єднувальним валом ПКВ не передавав крутного моменту, а працював за своїми опор в поперечному напрямку як пов'язана група перпендикулярних стрижнів, то в схемі на рис. 2 ролі помінялися. Тут, подібно перпендикулярним стержнів, працюють центральні опорні ексцентрики 2 (ЦОЕ), забезпечуючи сприйняття і передачу на корпус блок-картера поперечних опорних навантажень від ПКВ. Крутний момент через ЦОЕ не передається. Замість підшипників ковзання на них легко можна використовувати підшипники кочення.
Здавалося б, беручи до уваги взаємно перпендикулярне розташування несучих поверхонь плазунів (якщо кут розвалу циліндрів 90 °), можна було б вилучити ЦОЕ з даної схеми, ліквідувавши зайву кінематичний зв'язок, але робити цього не слід з двох причин. По-перше, ЦОЕ виконує в кінематичній схемі безшатунного механізму важливу функцію точки опори С при естафетної передачі бічних навантажень через балку АСВ (рис. 1) між повзунами суміжних пар циліндрів під час прямого і зворотного ходу поршнів. Цей принциповий момент роботи безшатунного механізму свого часу обгрунтований ще С.С. Баландіним [1]. По-друге, ЦОЕ завжди знаходиться в протифазі до поршня, що досягає ВМТ, тому його бокова поверхня служить місцем закріплення врівноважують противаг для кожного двоциліндрового (схема V) або чотирициліндрового (схема Х) модуля циліндрів.
До цих пір мова йшла про використання принципу шарнірного паралелограма для передачі крутного моменту двигуна на вихідний вал з кінця цільного ПКВ, що характерно для варіанту А. Однак з'ясувалося, що елементам шарнірного паралелограма цілком під силу взяти на себе поперечну опорну навантаження від газових і інерційних сил , що діють в площині модуля циліндрів. Іншими словами, з'явилася можливість відмовитися від опорних шийок ПКВ з ЦОЕ, замінивши їх силовими пальцями і сережками шарнірного паралелограма, і отримати в результаті ще більш простий варіант безшатунного механізму. Його схема, позначена як варіант Б, зображена на рис. 3 в додатку до чотирициліндровий двигун.
Факт відсутності опорних шийок ПКВ і ЦОЕ робить механізм не тільки ще більш простим, а значить і надійним, але і надає йому нові важливі властивості. Наприклад, вперше відкривається можливість створення компактних транспортних довгоходові конструкцій ДВС з відношенням Sп / Dц = 1,6 ... 2,4 при збереженні оборотності, властивої двигунів з КШМ. При цьому вдається значною мірою реалізувати відомі [1] швидкісні резерви безшатунного механізму, які були виявлені в ньому ще в початковий період розвитку. Середні швидкості поршнів в довгоходові варіанті Б безпечно можуть вибиратися в більш високому діапазоні 16 ... 24 м / с (у КШМ 10 ... 12 м / с). В результаті довгоходові безшатунного ДВС отримують більш пологу характеристику моменту, що надає їм хороші тягові якості. Менше відношення площі камери згоряння (КС) до її обсягу помітно зменшує втрати тепла в циклі. Забезпечується підвищений лінійний розмір КС, що важливо, наприклад, для дизелів надвисокої роздільної стиснення, де виникають серйозні труднощі з формуванням геометрії надпоршневого простору.
Побудова гармонік зміни напруг елементів ПКВ у варіанті Б підказує, що в ньому має відбуватися поздовжнє загасання амплітуди крутильних коливань, так як кожна пара його силових пальців по торцях має окремі обертаються в протилежну ПКВ сторону сережки, які працюють за кутом повороту вала поперемінно на стиск і розтягнення. Амплітуди зміни напружень в них не збігаються з амплітудою коливань напруги від крутного моменту суміжних шийок ПКВ. Причому, наявність декількох парних несучих гідродинамічних масляних шарів на поверхнях ковзання силових пальців шарнірного паралелограма створює додатковий демпфуючий ефект.
Виникає питання - а як же функція точки опори С (рис. 1) при естафетної передачі бічних навантажень між повзунами суміжних пар циліндрів по балці АСВ, яку ЦОЕ виконують у варіанті А. Адже, як було сказано вище, ця функція важлива і необхідна для правильної роботи безшатунного механізму.
Протиріччя насправді немає. Названа функція реалізується сережками шарнірного паралелограма безпосередньо в процесі обертання на силових пальцях. Сережки механізму в варіанті Б стають ланкою ОС (рис. 1) замість вилучених ЦОЕ (рис. 2).
Відзначимо переваги і недоліки розроблених безшатунного схем варіантів А і Б по відношенню до схем, дослідженим С.С. Баландіним.
Преимущества:
- значне спрощення конструкції, завдяки відсутності в варіантах А і Б двох пар шестерень і синхронізуючого вала з його опорами, а у варіанті Б, додатково, - вилучення опорних шийок ПКВ і ЦОЕ;
- у варіанті Б немає високих лінійних швидкостей на робочих поверхнях штокової шийок через відсутність ексцентриків великого діаметра;
- діаметр силових пальців шарнірного паралелограма в кілька разів менше діаметра штокової шийок ПКВ, відповідно, не дивлячись на подвійну кутову швидкість обертання сполучених елементів, подвійна лінійна швидкість ковзання на їх робочих поверхнях стає по величині менше одинарної швидкості ковзання на штокової шейках ПКВ;
- варіант Б допускає створення довгоходові конструкцій поршневих машин з відношенням Sп / Dц = 1,6 ... 2,4;
- у варіанті Б довгоходові виконання реалізуються великі середні швидкості поршня (16 ... 24 м / с і вище) з запасом по швидкохідності, в тому числі для короткочасних надзвичайних режимів;
- у варіанті Б кутовий зсув розташування кожної пари штокової шийок ПКВ, наприклад на 120 ° або 180 °, реалізується без істотного ускладнення конструкції;
- варіант Б менше схильний до негативних наслідків крутильних коливань ПКВ і володіє внутрішнім демпфирующим ефектом;
- у варіанті Б силові пальці розвантажуються при роботі механізму також, як опорні шийки механізмів, досліджених С.С. Баландіним [1];
- зменшено кількість різнотипних деталей;
- як наслідок, знижена трудомісткість виробництва і металоємність вироби;
- за рахунок простоти форми елементів шарнірного паралелограма забезпечена хороша технологічність конструкції механізму;
- сережки шарнірного паралелограма допускають спільну механічну обробку поверхонь, що сполучаються, що дозволяє легко забезпечити необхідну групову точність заданого міжосьової відстані;
- як наслідок, спрощена збірка і розбирання;
- додатково (приблизно на 35 ... 40%) зменшений реквізит діаметральний розмір картерной простору при збереженні достатньої жорсткості блок-картера.
недоліки:
- у варіанті А залишаються ексцентрики великого діаметра (ЦОЕ) з високими лінійними швидкостями ковзання поверхонь, тому ставлення Sп / Dц тут має обмеження Sп / Dц = 0,7 ... 0,9, характерне для Короткоходовая ДВС. Верхню межу вказаного інтервалу можна підняти до 1,2 і навіть вище, якщо використовувати можливість розміщення в ЦОЕ кулькових або роликових підшипників з керамічними тілами кочення;
- у варіанті А ПКВ схильний до дії крутильних коливань з тими ж закономірностями, що і колінчастий вал двигуна з КШМ;
- у варіанті А кутовий зсув розташування пар штокової шийок ПКВ (наприклад, на 120 ° або 180 °) вимагає жорсткої синхронізації всіх ЦОЕ додатковим валом з парами шестерень, що скасовує переваги схеми і тому не застосовується;
- вузьким місцем для варіантів А і Б є необхідність забезпечення високої координатної точності розташування силових пальців на план-шайбах ПКВ щодо центрів штокової шийок і на план-шайбах центрального опорного валу щодо його центру. За умовою збирання, зі збільшенням числа силових пальців вимоги до точності підвищуються;
- у варіанті Б складніше вирішуються питання забезпечення балансування, тому що сережки шарнірного паралелограма, які вчиняють протилежне колінчастого валу обертання, малі за розмірами і на них немає можливості розмістити противаги необхідної маси.
Варіанти А і Б можуть бути реалізовані в наступних компоновках:
- V-образна. 2-, 4-, 6-, 8-, 12-, 16-циліндрові;
- X-подібна. 4-, 8-, 12-, 16-, 20-, 24-, 28-, 32-циліндрові;
- опозитний (з паразитними шийками ПКВ). 2-, 4-, 6-, 8-, 12-, 16-циліндрові;
- рядна (з паразитними шийками ПКВ). 2-, 4-, 6-, 8-, 12-, 16-циліндрові.
Питання про те, який з варіантів А чи Б безшатунного механізму використовувати в конкретної безшатунного схемою має вирішуватися виходячи з аналізу вимог до майбутньої поршневий машині. Так, варіант А краще пристосований для двоциліндрового рядного і чотирициліндрового опозитного ДВС з паразитного шийкою на ПКВ. У цих схемах він дозволяє отримати симетричний ПКВ і в два рази знизити загальну величину врівноважують мас. Варіант Б є універсальним. Він добре вписується в усі наведені вище типи компоновок, має мінімальні величини врівноважують мас і може бути застосований не тільки для новостворюваних поршневих машин, але і для модернізації серійної продукції з КШМ.
З питання про компоновках доречно заперечити - навіщо обговорювати оппозітниє і рядні двигуни з паразитними шийками на ПКВ, коли звичайний КШМ для цих типів схем виходить простіше. Дійсно, якщо мати на меті повторення пройденого досвіду, то застосування КШМ не найгірша вихід. Але, якщо ставиться мета досягнення нового рівня конструкції ДВС з реалізацією швидкісних, ресурсних, масово-габаритних і інших можливостей безшатунного механізму, то необхідно враховувати, що паразитная шийка може замінювати собою відповідну опорну шийку ПКВ, відрізняючись тільки тим, що на неї буде одягнений повзун , який має свободу переміщення в напрямку відмінному від напрямку осі робочих циліндрів (зазвичай під кутом 90 °). Так, для чотирициліндрових оппозітних або двоциліндрових рядних безшатунного двигунів потрібно всього одна така шийка, а врівноважують маси розподіляються в рівних частках між ПКВ і ЦОЕ. У двотактних двигунах паразитная шийка з одного кінця може бути завантажена продувальним поршнем, що працюють в окремому допоміжному циліндрі.
І це ще не все. В автомобілебудуванні останнє десятиліття простежується тенденція до зменшення робочих обсягів ДВС з переходом на гібридні силові установки. В машинах з'являється додатковий досить потужний розгінний електродвигун. Вартість гібридного автомобіля зростає приблизно на 40% і окупається тільки при тривалій інтенсивної експлуатації.
На противагу гібридної схемою безшатунного двигун, завдяки прямолінійного руху штока і поршня, дозволяє вирішити ті ж завдання в одному компактному агрегаті. Особливість полягає в тому, що підпоршневу обсяги в робочих циліндрах використовуються послідовно за часом як компресорні, рухові і гальмівні порожнини з можливістю рекуперації частини кінетичної енергії руху.
Коли є надлишок потужності основних робочих циліндрів, він витрачається підпоршневу обсягами в компресорному режимі. Відбувається підкачка розгінного повітряного балона. В процесі розгону підпоршневу порожнини працюють спільно з робочими циліндрами, перемикаючись в руховий режим. Витрачається енергія стисненого повітря, накопичена в гальмівному і розгінний балоні. В трансмісію автомобіля додається необхідне збільшення потужності й крутного моменту. Нарешті, при гальмуванні основні робочі циліндри працюють на мінімальній потужності, а підпоршневу порожнини рекуперують кінетичну енергію руху шляхом зміни інтенсивності підкачки гальмівного балона за допомогою гальмівної педалі.
У силовій установці зі звичайним КШМ описаний алгоритм можна реалізувати тільки в двох окремих агрегатах і з гіршим загальним ККД У безшатунного двигуні загальний потрібний обсяг силової установки з урахуванням параметрів довгоходові версії, ємності розгінного і гальмівного балона приблизно на 30 ... 35% менше.
Висновок
1. Використання елементів шарнірного паралелограма в якості сполучних ланок між ПКВ і центральними опорними полуваламі змінює вигляд і покращує ряд конструктивно-технологічних властивостей безшатунного механізму, робить його значно простіше і надійніше. Дане конструктивне рішення підтверджено патентом Росії з авторським пріоритетом від 15.09.2009 р
2. Результати проведених досліджень дають підставу стверджувати, що варіанти А і Б нових безшатунного механізмів за своїми параметрами стають привабливими для використання в поршневих машинах і здатні скласти гідну конкуренцію КШМ.
література
1. С.С. Баландін. Безшатунного двигуни внутрішнього згоряння. М. Машинобудування. 1972 р
2. В.А. Ворогушін. Усунення ефекту кліненія в безшатунного механізмі С.С. Баландіна. М. Автомобільна промисловість. № 1, 2009 г.
3. В.Н. Симонов, С.С. Сурака. Розмірні ланцюги безшатунного механізму ДВС С.С. Баландіна. Аналіз працездатності механізму. М. Вантажівка. № 10, 2008 р
4. Е.П.Голубков. Авіаційні безшатунного двигуни внутрішнього згоряння. Інформаційна записка. М. 2009 р Реєстр. № 16207 РАО 155 стр. 05.02.2010 р.
Але як?
Поставити між вихідним валом і ПКВ карданний вал?
Використовувати ШРУС?
