
 С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
С сентября 2006 года серийно выпускается БМВ 3-й серии купе (Е92). Невзирая на свое техническое родство с седаном и Touring, купе БМВ 3-й серии имеет
 Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
Аш длительный тест Range Rover Sport Supercharged подошел к концу. Первая хорошая новость: машину не угнали! Вторая: несмотря на соблазн, за
 Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
Audi E-tron, представленный на автосалоне в Детройте в январе 2010 года, совсем не то же самое, что E-tron, который выставлялся осенью на IAA 2009 во
 В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
В зимнее время года при морозной погоде аккумулятор автомобиля испытывает нагрузку намного больше, чем в летнее время. Автовладельцами замеченны
 Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
Эта модель расширяет присутствие компании SEAT в сегменте рынка престижных автомобилей. Toledo - первый автомобиль компании дизайн которого выполнен
 В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
В 2000 г. семейство японских Corolla лишь обновилось. Спрос на эти машины падал и классическая Corolla уже не устраивала японских покупателей. Как
 Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
Skoda Octavia - это современный переднеприводной автомобиль с поперечным расположением двигателя. На нём может стоять один из пяти моторов концерна
 Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
Дебют серийной модели PT Cruiser состоялся в 1999 году в Детройте. Компании Chrysler удалось зацепить ностальгическую струну в душе каждого простого
 Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
Компания сыграла на контрасте, представив одновременно две модели, совершенно противоположные по идеологии: сверхэкономичный лимузин-гибрид А8 и
 Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот
Toyota Tundra (Тойота Тундра) проектировался как грузовик. Мощный двигатель, основательная рама и большая грузоподъемность... вот что отличает этот

Ремонт і Сервіс N 12, 2008
Дмитро Соснін, Михайло Мітін
Дана стаття люб'язно надана для ознайомлення читачам " РадіоЛоцмана "видавництвом "Ремонт і Сервіс"
Пристрій і принцип дії
Суть конструкції електронного приводу акселератора полягає в тому, що переміщення дросельної заслінки здійснюється не як зазвичай, за допомогою троса і тяг, безпосередньо пов'язаних з педаллю акселератора в салоні, а електродвигуном, що працює під управлінням електроніки. При цьому відсутня традиційна механічна зв'язок між педаллю акселератора і дросельною заслінкою.
Це означає, що зміна водієм положення педалі акселератора перетворюється в електричний сигнал і передається в блок керування, який, в свою чергу, здійснює управління переміщенням дросельної заслінки.
Така організація взаємодії дозволяє блоку управління змінювати положення дросельної заслінки і впливати на величину крутного моменту двигуна навіть в тому випадку, коли водій не змінює положення педалі акселератора.
Порівняємо старий і новий методи управління.
Механічне управління переміщенням дросельної заслінки
Водій безпосередньо контролює становище педалі акселератора. Блок управління двигуном при цьому не може вплинути на становище дросельної заслінки. Тому, щоб змінити крутний момент двигуна, доводиться впливати на інші параметри режиму двигуна, наприклад, на момент запалювання і вприскування палива, що як правило, не завжди ефективно і коректно. Тільки коли водій не впливає на педаль акселератора, тобто в режимі холостого ходу і при роботі круїз-контролю, здійснюється електронне управління роботою двигуна.
Електронне урядування переміщенням дросельної заслінки
При цьому методі переміщення дросельної заслінки завжди відбувається під управлінням електроніки. Водій, відповідно до намірів зі зміни обертів двигуна, впливає на педаль акселератора. Положення педалі відстежується датчиками, і сигнали від них передаються блоку управління роботою двигуна. Від нього електродвигун отримує команду на цілком певний переміщення дросельної заслінки відповідно до зміни положення педалі акселератора. У тих випадках, коли є необхідність зміни крутного моменту двигуна з причин забезпечення безпеки руху або економії палива, блок керування двигуном може змінити положення дросельної заслінки самостійно, без зміни водієм положення педалі акселератора.
Таким чином, нова якість управління зводиться до того, що блок керування регулює положення дросельної заслінки відповідно до побажань водія, необхідністю забезпечення безпеки руху, зниження витрати палива і екологічними вимогами. Електронне урядування реалізується зміною положення дросельної заслінки, тиску наддуву, моменту уприскування палива і моменту запалювання, а також застосуванням технології відключення циліндрів.
Досягнення оптимального крутного моменту
Блок управління двигуном обробляє зовнішні впливи і внутрішні вимоги щодо величини крутного моменту двигуна і, виходячи з алгоритму вбудованої програми, розраховує необхідну величину крутного моменту. Даний метод набагато точніше і ефективніше, ніж механічний.
Зовнішні впливи виникають від:
- дій водія;
- автоматичної коробки передач (в момент перемикання);
- кліматичної установки (включення і виключення компресора);
- навантаження генератора;
- гальмівної системи;
- круїз-контролю (GRA).
Внутрішні вимоги виникають від:
- умов пуску двигуна;
- підігріву каталізатора;
- регулювання примусового холостого ходу (MSR);
- обмеження потужності;
- обмеження частоти обертання двигуна;
- регулювання складу суміші за вмістом кисню в відпрацьованих газах;
- з боку системи контролю тяги (ASR).
Після того як оптимальний крутний момент двигуна розрахований, він порівнюється з фактичним крутним моментом, який визначається виходячи з частоти обертання двигуна, даних про навантаження двигуна і моменту запалювання. Якщо при порівнянні величини не збігаються, блок управління двигуна визначає напрямок і величину необхідного комплексного впливу на системи двигуна з метою досягнення збігу фактичного крутного моменту з оптимальним.
Для цього змінюються параметри, які відносно довго впливають на процес зміни крутного моменту двигуна. Це кут відкриття дросельної заслінки і тиск наддуву в двигунах з турбонаддувом. Крім цього виявляється вплив на характеристики, які відносно швидко змінюють величину крутного моменту. Це момент запалювання, момент упорскування палива і відключення циліндра (ів).
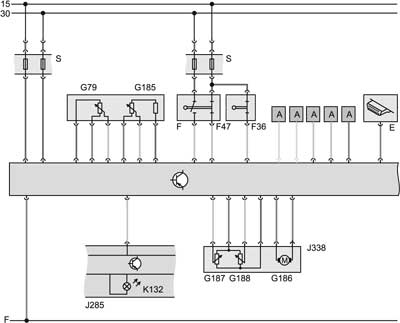
Як приклад практичної реалізації електронного приводу акселератора розглянемо блок-схему подібної системи автомобілів AUDI.
Блок-схема системи електронного приводу дросельної заслінки автомобілів AUDI
Блок-схема системи електронного приводу дросельної заслінки приведена на рис. 1.
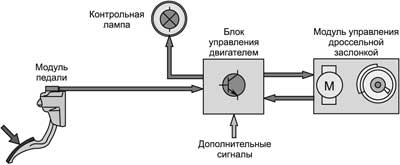
Мал. 1.
До складу системи входять:
- модуль педалі акселератора;
- блок керування двигуном;
- модуль управління дросельної заслінки;
- контрольна лампа електронного приводу дросельної заслінки.
Модуль педалі акселератора
Цей модуль за допомогою датчиків безперервно визначає положення педалі акселератора і передає відповідну інформацію в аналоговому вигляді блоку управління двигуна.
Він складається з педалі акселератора, датчика 1 положення педалі акселератора G79 і датчика 2 положення педалі акселератора G185 (рис. 2).
Для підвищення надійності модуля використовуються два однакових датчика, ця реалізація запозичена із спеціалізованих систем і не є чимось особливо новим.
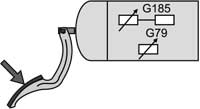
Мал. 2
Отримуючи інформацію від обох датчиків положення педалі акселератора, блок керування двигуном визначає положення педалі в кожен момент часу. Датчики конструктивно представляють собою потенціометри зі змінним контактом, укріпленим на загальному валу (рис. 3). При кожній зміні положення педалі змінюється опір датчиків і, відповідно, напруга, яке передається на блок управління двигуна.
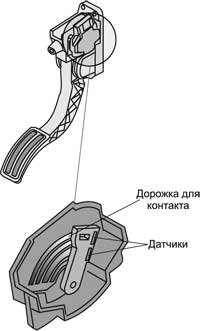
Мал. 3
Кожен датчик положення педалі акселератора для підвищення надійності має свій провід живлення напругою 5 В (червоний), свій провід з'єднання з "масою" (коричневий) і свій вихідний сигнал (зелений провід). Датчик G185 навантажений додатковим опором (рис. 4). Завдяки цьому отримують дві різні характеристики аналогових сигналів. У блоці управління сигнали датчиків аналізуються в процентах. Це означає, що 100% відповідає 5 В в ланцюзі без навантажувального опору.
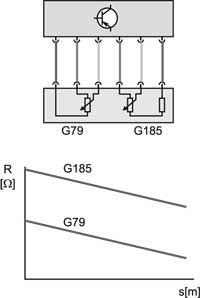 "
"
Мал. 4
За граничним значенням напруги орієнтуються режими "кік-дауна» і холостого ходу. Вимикач режиму холостого ходу розташований в розподільній скриньці дросельної заслінки.
Розглянемо роботу блоку при виникненні несправностей.
Робота системи приводу дросельної заслінки при виникненні несправностей
Відсутня сигнал від одного з датчиків
- Інформація про збої заноситься в реєстратор несправностей, запалюється контрольна лампа електронного приводу акселератора.
- Двигун примусово переходить в режим холостого ходу. Втечение певного контрольного терміну зчитується інформація від другого датчика, якщо вона орієнтується, система повертається в режим штатного управління рухом автомобіля.
- При повному натисканні на педаль акселератора частота обертання двигуна збільшується, але повільніше, ніж зазвичай.
- Додатково відбувається упізнання режиму холостого ходу виходячи з аналізу положення педалі за допомогою вимикача сигналів гальмування F або вимикача по положенню педалі гальма F47.
- У режимі примусового холостого ходу комфортні функції, наприклад круїз-контроль або регулювання двигуном, відключаються.
Відсутня сигнал від обох датчиків
- Інформація про збої заноситься в реєстратор несправностей, запалюється контрольна лампа електронного приводу акселератора.
- Двигун працює тільки на підвищених обертах холостого ходу (максимально 1500 об / хв) і не реагує на педаль акселератора.
Можлива ситуація, коли одночасний вихід з ладу двох датчик не буде пізнаний системою управління. При цьому контрольна лампа не загориться, а двигун буде працювати на підвищених обертах холостого ходу і не буде реагувати на педаль акселератора.
Блок керування двигуном
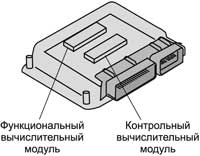
Мал. 5
Мал. 6
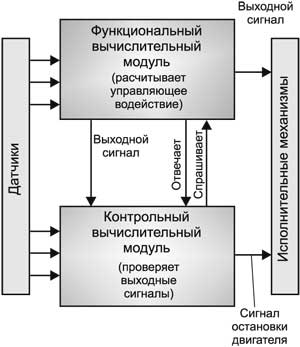
Цей блок (див. Рис. 5 і 6) аналізує, контролює і управляє системою електронного приводу дросельної заслінки виходячи з зовнішніх впливів і внутрішніх вимог до системи. Він складається з функціонального і контрольного модулів.
Функціональний модуль отримує сигнали від датчиків, обробляє їх і управляє виконавчими пристроями. Додатково здійснюється взаємна перевірка обох модулів, при цьому використовується функція "питання-відповідь». Якщо при цьому стався збій в роботі, обидва обчислювальних модуля можуть незалежно один від одного, за допомогою впливу на модуль управління дросельною заслінкою (запалювання і впорскування палива), зупинити двигун.
8 - перегляд блоку заміряються параметрів.
Модуль управління дросельною заслінкою
Цей модуль забезпечує необхідну масу повітря, що надходить в циліндри. Він складається з наступних вузлів (див. Рис. 7):
- корпусу дросельної заслінки;
- дросельної заслінки;
- приводу дросельної заслінки G186;
- кутового датчика 1 приводу дросельної заслінки G187;
- кутового датчика 2 приводу дросельної заслінки G188.
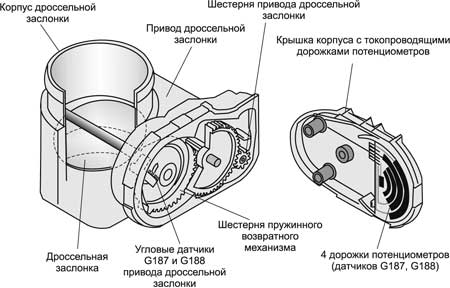
Мал. 7
Модуль управління дросельною заслінкою J338 розташований на впускному колекторі, виробник забороняє його розкривати і ремонтувати. Після заміни модуля управління дросельної заслінки слід провести установку вихідного положення.
Розглянемо роботу модуля.
Привід дросельної заслінки здійснює функцію переміщення заслінки. Він являє собою електродвигун, що працює відповідно до команд від блоку управління. Привід через передавальний механізм змінює положення дросельної заслінки, таким чином здійснюється плавне переміщення від положення холостого ходу до положення повного газу.
Сигнали від кутових датчиків положення дросельної заслінки пропорційні ступеня її відкриття і надходять в блок управління двигуна.
Два датчика встановлені з метою підвищення надійності системи.
Обидва датчика (див. Рис. 8) мають загальний провід живлення (червоний) і загальний провід з'єднання з "масою" (коричневий). Кожен датчик має свою сигнальну лінію (зелений провід). Привід дросельної заслінки управляється окремою шиною (синій провід).
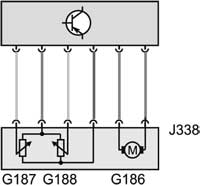
Мал. 8
Положення дросельної заслінки
Дросельна заслінка може перебувати в різних положеннях (див. Рис. 9 і 10).
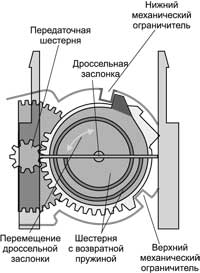
Мал. 9
Мал. 10
Нижній механічний обмежувач
У цьому положенні дросельна заслінка закрита. Цей обмежувач необхідний для установки вихідного положення модуля управління дросельної заслінки.
Нижній електронний обмежувач
Визначається блоком управління двигуна і знаходиться трохи вище нижнього механічного обмежувача. При роботі двигуна дросельна заслінка закривається до нижнього електронного обмежувача, ніж запобігає зіткнення дросельної заслінки з корпусом.
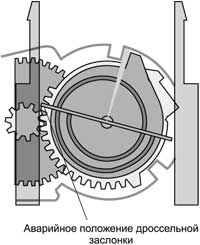
Аварійне становище
При знеструмленому приводі дросельної заслінки вона за допомогою поворотної пружини переміщається в аварійне становище. У цьому положенні заслінка трохи прочинені і допускається вельми обмежене за можливостями рух автомобіля при підвищеній частоті обертання на холостому ходу.
Верхній електронний обмежувач
Визначається блоком управління двигуна. Він не впливає на крутний момент двигуна, оскільки лежить в зоні "хвильових коливань» дросельної заслінки (положення повного відкриття заслінки, при якому вона трохи вібрує).
Верхній механічний обмежувач
Розташований над верхнім електронним обмежувачем. Він також не впливає на крутний момент двигуна, так як лежить в зоні "хвильових коливань» дросельної заслінки.
Робота при виході ізстроя приводу дросельної заслінки
При виході з ладу приводу дросельної заслінки відбувається наступне:
- дросельна заслінка автоматично переміщається в аварійне становище.
- Ця ситуація вноситься в реєстратор несправностей і включається контрольна лампа електронного приводу акселератора.
- У розпорядженні водія залишається можливість аварійного управління.
- Комфортні функції, наприклад круїз-контроль, відключені.
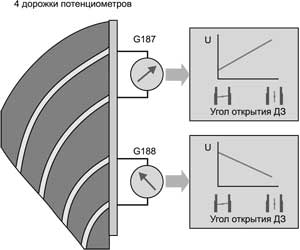
Кутові датчики 1 і 2 приводу дросельної заслінки
Обидва датчика (позначення G187 і G188) представляють собою потенціометри. Ковзаючі контакти укріплені на шестерні, яка розміщена на валику дросельної заслінки.
При зміні положення дросельної заслінки змінюється опір потенціометрів і, відповідно, сигнальне напруга, яке передається в блок керування двигуна. Графіки залежності напруги від кута повороту обох потенціометрів (рис. 11) асиметричні, тому блок управління двигуна може відрізняти потенціометри один від іншого і здійснювати перевірочні функції.
Після обробки сигнали датчиків вимірюються у відсотках. Це означає, що 0% відповідає нижньому механічному обмежувача, 100% - верхнього електронного обмежувача.
Робота при відсутності сигналів з кутових датчиків
Блок управління двигуном отримує від одного з кутових датчиків слабкий, невиразний сигнал або не отримує зовсім
- Помилка заноситься в реєстратор несправностей і включається контрольна лампа електронного приводу акселератора K132.
- Підсистеми, які в якійсь мірі визначають крутний момент (наприклад, круїз-контроль, регулювання двигуна в режимі примусового холостого ходу), відключаються.
- Для контролю залишився датчика використовується сигнал навантаження.
- Педаль акселератора діє нормально.
Блок управління двигуна отримує від обох кутових датчиків слабкі, невиразні сигнали або не отримує їх
- Помилка заноситься в реєстратор несправностей і включається контрольна лампа електронного приводу акселератора K132.
- Привід дросельної заслінки відключається.
- Двигун працює тільки з підвищеною частотою холостого ходу 1500 об / хв і не реагує на педаль акселератора.
Контрольна лампа електронного приводу акселератора
Контрольна лампа електронного приводу акселератора K132 (див. Рис. 11) відображає несправність. Вона розміщена на щитку приладів - лампа жовтого кольору з написом "EPC» (Electronic Power Control - електронне управління потужністю, в нашому випадку - електронний привід акселератора).
Мал. 11
Режим роботи лампи
Після включення запалення лампа загоряється на 3 секунди. Якщо немає записів в реєстраторі несправностей, і ця несправність не знайдено, лампа гасне. При виникненні несправності в системі блок управління двигуна включає лампу, а в реєстратор несправностей заноситься несправність.
Робота при виході з ладу лампи
Несправність лампи не робить ніякого впливу на дію електронного приводу акселератора, але ця несправність заноситься в реєстратор несправностей, при цьому неможливо дізнатися про виникнення справжньої несправності в системі, але можна помітити, що при включенні запалювання лампа не загоряється на 3 секунди.
Додаткові сигнали, використовувані при роботі системи електронного приводу
Вимикач сигналів гальмування F і вимикач по положенню педалі гальма F47
Обидва датчика знаходяться в єдиному вузлі на педалі гальма. Сигнал "Педаль гальма натиснута» (див. Фрагмент функціональної схеми на рис. 12) використовується системою електронного приводу акселератора в такий спосіб:
- веде до відключення круїз-контролю;
- застосовується для введення режиму холостого ходу, коли один з датчиків положення педалі акселератора вийшов з ладу.
Вимикач по положенню педалі гальма F47 служить для підвищення надійності системи в якості другого джерела інформації для блоку управління двигуном.
Коли один з датчиків вийде з ладу, або сигнали орієнтуються як невиразні, блок управління двигуна робить наступні дії:
- комфортні функції, наприклад круїз-контроль, відключаються;
- якщо до того ж несправний один з датчиків положення педалі акселератора, двигун працює на підвищених обертах холостого ходу.
Вимикач сигналів гальмування F (див. Рис. 12) в початковому положенні розімкнути і харчується від клеми "30". Вимикач сигналів гальмування F в початковому положенні замкнутий і харчується від клеми "15".
Мал. 12
Вимикач по положенню педалі зчеплення F36
За сигналом від вимикач по положенню педалі зчеплення блок керування двигуна пізнає вичавлення положення педалі зчеплення. У результаті буде вимкнено круїз-контроль і регулювання зміною навантаження двигуна.
Вимикач F36 в початковому положенні замкнутий (див. Рис. 12) і живиться від клеми "15". Вимикач по положенню педалі зчеплення не перебуває під контролем самодіагностики. Заміна сигналу від нього не передбачена.
F - вимикач сигналів гальмування
F36 - вимикач по положенню педалі зчеплення
F47 - вимикач по положенню педалі гальма
G79 - датчик 1 положення педалі акселератора
G185 - датчик 2 положення педалі акселератора
G186 - привід дросельної заслінки
G187 - кутовий датчик 1 приводу дросельної заслінки
G188 - кутовий датчик 2 приводу дросельної заслінки
J ... - блок управління двигуна
J285 - блок управління з модулем покажчиків на приладовому щитку
J338 - модуль управління дросельної заслінки
K132 - контрольна лампа електронного приводу акселератора
S - запобіжники
A - шина даних CAN
B - сигнал швидкості
З - круїз-контроль
D - компресор кліматичної установки "включений / виключений»
E - гніздо діагностики
самодіагностика
Цей розділ необхідний фахівцям, які мають обладнанням і які пройшли навчання у виробника або офіційного дилера.
За допомогою діагностичної, вимірювальної та інформаційної системи VAS 5051 можуть бути здійснені наступні функції самодіагностики по відношенню до електронного приводу акселератора:
-02 - запит реєстратора несправностей;
-03 - діагностика виконавчих пристроїв;
-04 - установка вихідного положення;
-05 - очищення реєстратора несправностей;
-06 - закінчення виконання завдання;
-08 - перегляд блоку заміряються параметрів.
Інші статті з журналу «Ремонт & Сервіс» можна знайти в файловому архіві на сайті видавництва www.remserv.ru
